/ 2023 Achievements /
光機電技術研發中心研究成果
Research Achievements of Opto-Mechatronics Technology Center
-
內建荷重計的創新型球擠光工具
Innovative Ball Burnishing Tool Embedded with a Load Cell
-
由修芳仲教授帶領光機電中心研究團隊完成研製,已整合於機械系五軸加工中心,並成功進行工件的球擠光及球拋光表面精加工研究。
-
Professor Fang-Jung Shiou led the research team at the Opto-Mechatronics Technology Center in developing and integrating an innovative ball burnishing tool into a five-axis machining center. Their research successfully explored surface finishing techniques for workpieces using ball squeezing and polishing.
-
專利申請已於112年11月7日通過臺科大技轉中心,專利案號112142895。
-
The patent application was approved by the Technology Transfer Center of NTUST on November 7, 2023, with the patent number 112142895.

此圖為擠光工具系統整合於五軸加工機
This figure shows the integration of the polishing tool system into a five-axis machining center.
智慧型機器人研究中心研究成果
Research Achievements of Center for Intelligent Robotics
-
使用觸覺回饋開發機械手臂於手術環境之應用
Development of Haptic Feedback-Enabled Robotic Arm for Surgical Environment Applications
-
顏家鈺校長專注於「使用觸覺回饋開發機械手臂於手術環境之應用」之研發,透過蒙特卡羅演算法和機器學習修正卡布希演算法,成功在受限空間內精準穿刺病灶,降低操作者對準所需時間。
-
Principal Jia-Yush Yen focuses on the research and development of "Development of Haptic Feedback-Enabled Robotic Arm for Surgical Environment Applications." Through Monte Carlo algorithms and machine learning to refine the Caboshi algorithm, the team successfully achieves precise lesion puncture in confined spaces, reducing the time required for operators to align.

此圖為研究中確認搓到病灶點的狀況
This figure depicts the confirmation of reaching the lesion point during the research.
-
機器手臂針對具形狀和尺寸變異物件全自主焊接操作技術和系統
Fully Autonomous Welding Operation Technology and System for Objects with Shape and Size Variations Using Robotic Armsvironment Applications
-
林其禹教授專注於「機器手臂針對具形狀和尺寸變異物件全自主焊接操作技術和系統」之研發,研究提出了一種機械手臂焊接的智慧路徑規劃方法,以克服手動示教和離線程式設計的挑戰。
-
Professor Chyi-Yeu Lin focuses on the research and development of "Fully Autonomous Welding Operation Technology and System for Objects with Shape and Size Variations Using Robotic Armsvironment Applications." The research proposes an intelligent path planning method for robotic arm welding to overcome the challenges of manual teaching and offline programming.

此圖為本研究的實驗環境
This figure shows the experimental setup.
-
精準機器手臂智慧製造序列技術A:消除多重誤差機器手臂姿態估計和法線軌跡全自動生成系統
Precise Robotic Arm Smart Manufacturing Sequence Technique A: Elimination of Multiple Errors in Robotic Arm Pose Estimation and Fully Automatic Generation of Normal Trajectories
-
林其禹教授專注於「精準機器手臂智慧製造序列技術A:消除多重誤差機器手臂姿態估計和法線軌跡全自動」之研發,新技術可同時實現曲面路徑跟蹤和法線軌跡生成,應用於機器手臂雷射切割等加工操作。實驗顯示該技術提高了精確性,潛力巨大,可應用於自動化雷射切割等操作。
-
Professor Chyi-Yeu Lin focuses on the research and development of "Precise Robotic Arm Smart Manufacturing Sequence Technique A: Elimination of Multiple Errors in Robotic Arm Pose Estimation and Fully Automatic Generation of Normal Trajectories." The new technology enables simultaneous surface path tracking and normal trajectory generation, applicable to machining operations such as robotic arm laser cutting. Experiments demonstrate improved precision, indicating significant potential for application in automated laser cutting and similar operations.

此圖為本研究的實驗環境
This figure shows the experimental setup.
-
攀爬機器人之開發
Development of Climbing Robots
-
李維楨教授專注於「攀爬機器人之開發」的研發,開發14公斤移動式橋梁鋼纜檢測機器人,能攀爬高達100米,單人操作,快速安裝。機器人採用振動量測和傅立葉轉換進行鋼纜振動頻譜分析,計算索力。
-
Professor Wei-chen Lee focuses on the research and development of "Development of Climbing Robots." He developed a 14kg mobile bridge cable inspection robot that climbs up to 100 meters. It's operated by one person and can be quickly installed. The robot uses vibration measurement and Fourier transform to analyze steel cable vibrations and calculate tension.

此圖為本研究之爬纜機器人實體
This figure shows the physical prototype of the climbing robot developed in this research.
-
高負載自主移動機器人
High PayLoad Autonomous Mobile Robot (HAMR)
-
林柏廷教授專注於「高負載自主移動機器人」的研發,成功開發高負載機器人可有效負載70公斤,透過多點定位量測ArUco碼,實現HAMR精確定位,並使用差分演算法進行機械手臂的高效取物操作。
-
Professor Po Ting Lin focuses on the research and development of "High PayLoad Autonomous Mobile Robot." He has successfully developed a high payload robot capable of efficiently carrying a payload of 70 kilograms. Through multi-point positioning measurement of ArUco codes, precise localization of HAMR is achieved, enabling efficient pick-and-place operations of robotic arms using differential algorithms.

此圖為使用DIC進行高負載自主移動機器人位移量的實驗架設
This figure shows the experimental setup for measuring displacement using DIC in the high payload autonomous mobile robot.
-
人機協作的適應性避障技術
Adaptive Obstacle Avoidance Technology for Human-Robot Collaboration
-
林柏廷教授專注於「人機協作的適應性避障技術」的研發,成功開發一套人機協作避障系統,利用最佳化演算法迭代運算干涉路徑,縮短路徑規劃時間。
-
Professor Po Ting Lin focuses on the research and development of "Adaptive Obstacle Avoidance Technology for Human-Robot Collaboration." He has successfully developed a human-robot collaboration obstacle avoidance system that utilizes optimization algorithms to iteratively compute interference paths, thus reducing path planning time.

此圖為機械手臂動態避障的分析結果
This figure shows the analysis results of dynamic obstacle avoidance by the robotic arm.
-
馬達故障監測及能耗評估
Motor Fault Monitoring and Energy Consumption Assessment
-
劉孟昆教授專注於「馬達故障監測及能耗評估」的研發,首次採用殘差進行不同負載的故障診斷,此方法可更精準檢測與分類不同負載下的故障,有望提高工業生產效率,降低故障風險和維修成本。
-
Professor Meng-Kun Liu focuses on the research and development of "Motor Fault Monitoring and Energy Consumption Assessment." He pioneered the use of residuals for diagnosing faults under different loads, enabling more precise detection and classification of faults under various loads. This method holds the potential to enhance industrial production efficiency, reduce the risk of failures, and lower maintenance costs.

此圖為實驗設備馬達的現場照片
This figure shows a live photograph of the experimental setup of the motor equipment.
-
具備人物認知分析之智慧視覺系統
Intelligent Visual System with Person Recognition and Analysis
-
徐繼聖教授專注於「具備人物認知分析之智慧視覺系統」的研發,姿勢自適應形狀學習(PASL)處理大姿勢人臉重演。引入姿勢適應編碼器(PAEs)以在大姿勢中更好地保持來源標識。
-
Professor Gee-Sern Hsu focuses on the research and development of "Intelligent Visual System with Person Recognition and Analysis." The research involves Pose Adapted Shape Learning (PASL) for handling large-pose face reenactment. The introduction of Pose-Adapted Encoders (PAEs) helps better preserve source identities in large poses.

此圖為本研究開發PASL框架的配置包括解耦形狀編碼器(DSE)、目標人臉生成器(TFG)和6個PA編碼器,用於計算適應姿態的身份損失。
This figure shows the configuration of the developed PASL framework in our research, including the Disentangled Shape Encoder (DSE), Target Face Generator (TFG), and six PA encoders, used for calculating identity loss for adaptive posture."motor equipment.
-
具備環境認知分析之智慧視覺系統
Intelligent Visual System with Environment Recognition Analysis
-
徐繼聖教授專注於「具備環境認知分析之智慧視覺系統」的研發,實驗在英文STR基準和CSTC數據集上驗證了方法的有效性,但在英文和中文語言結構差異上有待改進。
-
Professor Gee-Sern Hsu focuses on the research and development of "Intelligent Visual System with Environment Recognition Analysis." The experiments validated the effectiveness of the method using the English STR benchmark and CSTC dataset. However, improvements are needed regarding the structural differences between English and Chinese languages.

此圖為本研究發展的SPG整體架構
This figure shows the overall architecture of the SPG developed in our research.
-
機械手臂終端器之加工力量控制機電模組開發
Development of Electromechanical Module for Force Control of Robotic Arm End-Effector
-
林紀穎教授專注於「機械手臂終端器之加工力量控制機電模組開發」的研發,開發主動式變力量控制系統應用於鑄件殘料加工,結合機械視覺與切削力模型,根據殘料尺寸變化規劃加工力量。
-
Professor Chi-Ying Lin focuses on the research and development of "Development of Electromechanical Module for Force Control of Robotic Arm End-Effector." He has developed an active force control system applied to casting residue processing, integrating machine vision and cutting force models to plan machining forces based on residual size variations.

此圖為本研究中主動式變力量控制系統
This figure shows the active force control system developed in this research.
-
災害應變機器人:基於人工智慧之物件與環境辨識
Disaster Response Robot: Object and Environment Recognition Based on Artificial Intelligence
-
李敏凡教授專注於「災害應變機器人:基於人工智慧之物件與環境辨識」的研發,基於深度學習的V-SLAM系統,解決視覺SLAM傳統問題。深度學習應用於空間資訊生成和迴圈閉合,有效處理不確定性和動態物體。
-
Professor Min-Fan Lee focuses on the research and development of "Disaster Response Robot: Object and Environment Recognition Based on Artificial Intelligence." He specializes in addressing traditional issues in visual SLAM using a deep learning-based V-SLAM system. Deep learning is utilized for spatial information generation and loop closure, effectively handling uncertainty and dynamic objects.
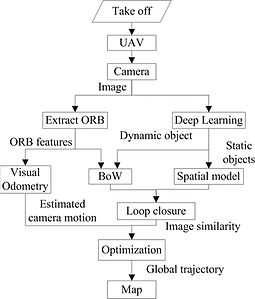
此圖為本研究使用的V-SLAM框架
This figure shows the V-SLAM framework used in our research.
-
具靜平衡之機械手臂機構設計
Design of Mechanical Arm Mechanism with Static Balance
-
陳羽薰教授專注於「具靜平衡之機械手臂機構設計」的研發,本研究提出一可附加於機械手臂的靜平衡機構,透過彈簧配置實現平衡手臂自重的扭矩,顯著提升機械手臂的載重能力。
-
Professor Yu-Hsun Chen focuses on the research and development of "Design of Mechanical Arm Mechanism with Static Balance." This study proposes a static balance mechanism that can be attached to a mechanical arm. By utilizing spring configurations, it achieves torque balance to counteract the weight of the arm, significantly enhancing the payload capacity of the mechanical arm.

此圖為本研究之靜力平衡機構與機械手臂裝配示意圖
This figure shows an assembly diagram illustrating the static balance mechanism attached to the mechanical arm developed in this study.
高階製造研發中心研究成果
Research Achievements of Advanced Manufacturing Research Center
-
針對數位微影定義PCB線路圖案0.5μm以上特徵,完成預測與分析曝光能量規劃演算法
Prediction and Analysis of Exposure Energy Planning Algorithms for Defining PCB Circuit Patterns with Features of 0.5μm and Above in Digital Lithography
-
郭鴻飛教授研究團隊提出了一種兩階段的能量規劃演算法。在第一階段,使用蒙地卡羅演算法對光點落點位置進行主要位置排列。接著於第二階段採用模擬退火演算法,以找到每個落點位置的最佳曝光時間。這個演算法基於每個微反射鏡的獨立規劃曝光時間,有效改善了圖案邊緣和轉角區域的成像效果。
-
Professor Hung-Fei Kuo's research team has proposed a two-stage energy planning algorithm. In the first stage, a Monte Carlo algorithm is utilized to arrange the primary positions of light spot placements. Subsequently, in the second stage, a simulated annealing algorithm is employed to determine the optimal exposure time for each light spot position. This algorithm independently plans the exposure time for each micro-mirror, effectively improving the imaging quality in pattern edge and corner regions.

優化前結果
The results before optimization.

優化後結果
The results after optimization.
-
半導體量測與微影實驗室
Semiconductor Measurement and Lithography Laboratory
-
於臺科大高階製造研發中心T1-102已開始建置半導體量測與微影實驗室,目前已完成部分工作如下圖所示。完成工作含高架無塵室級地板、化學清洗槽、電漿設備、氣瓶管線等。
-
A semiconductor measurement and lithography laboratory is being constructed in the Advanced Manufacturing Research Center T1-102 at NTUST. Partial completion of the work is shown in the figure below, including elevated cleanroom-grade flooring, chemical cleaning tanks, plasma equipment, gas cylinder pipelines, and more.




物聯網創新中心研究成果
Research Achievements of Center for IOT Innovation
-
設計自動導引車路線及交通控制策略
Designing Automated Guided Vehicle Routes and Traffic Control Strategies
-
周碩彥教授的研究團隊透過簡單的路由規則來改善分配過程。研究中主要聚焦於避免碰撞、及檢測自動導引車的周圍環境等問題。藉由曼哈頓距離,可以使用許多數量的AGV和Pod來完成分配,從而使分配過程更加有效。透過偵測路口的交通狀況並儲存資訊來實現交通控制和協調。與 FCFS 方式移動相比,該策略將交通擁堵次數顯著減少11.4%。
-
Professor Shuo-Yan Chou's research team improves distribution using simple routing rules. The study focuses on collision avoidance and detecting the surrounding environment of AGVs. Using Manhattan distance, numerous AGVs and Pods efficiently complete the allocation process. Traffic control and coordination are achieved by detecting traffic conditions at intersections and storing information. Compared to FCFS movement, this strategy reduces traffic congestion significantly by 11.4%.
-
即時動作識別系統
Real-time Action Recognition System
-
周碩彥教授的研究團隊開發了一款輕量級的即時動作識別系統,採用深度學習模型處理多目標動作識別,同時利用目標檢測和追蹤演算法實現多人動作識別,提升準確度並大幅縮短執行時間。研究成果表明,所提出的模型比基礎模型實現了快1.6倍的執行時間和快1.1倍的訓練時間,而沒有犧牲太大的準確性。
-
Professor Shuo-Yan Chou's research team developed a lightweight real-time action recognition system using deep learning models for multi-target action recognition. Target detection and tracking algorithms are utilized for multi-person action recognition, improving accuracy and significantly reducing execution time. The study findings indicate that the proposed model achieves 1.6 times faster execution time and 1.1 times faster training time compared to the baseline model, without sacrificing accuracy too much.
-
即時動作識別系統
Real-time Action Recognition System
-
周碩彥教授的研究團隊致力於解決製造業碳排放所帶來的挑戰。他們的研究主要包括設計數據結構、數據匯總器和數據存儲,以跟蹤和管理碳排放數據,確保其完整性和安全性。此外,為了應對氣候變化的緊迫性,他們提出了整合區塊鏈技術的解決方案,以提高排放交易系統的透明度和可靠性。同時,他們開發了Simheuristics框架,這是一種結合機器學習演算法和自適應粒子群優化的系統動力學方法,旨在優化能源結構,以實現能源供應的可持續發展。該研究的重要結果之一是發現,改進後的自適應粒子群優化算法(APSO)在解決能源結構問題方面性能明顯優於原始粒子群優化算法(PSO)。他們的研究還進行了針對美國不同情境的實驗,揭示了不同策略下能源結構調整的成本和排放效果。
-
Professor Shuo-Yan Chou's research team is dedicated to addressing the challenges posed by carbon emissions in the manufacturing industry. Their research primarily involves designing data structures, data aggregators, and data storage to track and manage carbon emission data, ensuring its integrity and security. Additionally, to address the urgency of climate change, they propose an integrated solution utilizing blockchain technology to enhance the transparency and reliability of emission trading systems. Moreover, they have developed the Simheuristics framework, a system dynamics approach combining machine learning algorithms and Adaptive Particle Swarm Optimization (APSO) to optimize energy structures for sustainable energy supply. One of the key findings of their research is the significant performance improvement of the enhanced APSO algorithm in addressing energy structure problems compared to the original Particle Swarm Optimization (PSO) algorithm. Their study also conducted experiments in different scenarios in the United States, revealing the cost and emission effects of energy structure adjustments under various strategies.
智慧製造創新中心研究成果
Research Achievements of Intelligent Manufacturing Innovation Center
-
協助正崴精密檢測微軟客製化搖桿上之瑕疵
Assistance in detecting defects on Microsoft's customized joysticks at Cheng Uei Precision Industry Co., Ltd.
-
姚智源教授指出協助正崴精密檢測微軟客製化搖桿上的各種瑕疵,由於客製化皆為少量資料,利用目前人工智慧檢測的方式,會有資料不足的問題,因此校方提出資料擴增之方式,使其原本成檢測直通率 45%,提升至 99%,並順利獲得微軟客戶之認可。
-
Professor Chih-Yuan Yao pointed out that assisting Cheng Uei Precision Industry Co., Ltd. in detecting various defects on Microsoft's customized joysticks posed a challenge due to the limited data available for customization. Utilizing current artificial intelligence detection methods faced issues due to insufficient data. Therefore, the university proposed a data augmentation approach. This resulted in increasing the original detection pass rate from 45% to 99%, leading to successful recognition from Microsoft's customers.

本研究利用生成式AI製作合成資料,提高檢出率。
This study utilizes generative AI to create synthetic data, thereby enhancing the detection rate.

本研究利用生成式AI製作合成資料,並用人工智慧完成影像降噪,提升影像清晰度,並提高檢出率。
This study utilizes generative AI to create synthetic data and employs artificial intelligence for image denoising to enhance image clarity, thereby increasing the detection rate.
-
協助英業達集團開發工廠擴增實境協作系統
Assisting Inventec Corporation in developing a factory augmented reality collaboration system
-
姚智源教授之研究團隊協助英業達集團開發工廠擴增實境協作系統,讓拼裝人員能夠做好事前教育,並且後續導入產線,協助線上人員在拼裝上的效率與正確性。
-
Professor Chih-Yuan Yao's research team assists Inventec Corporation in developing a factory augmented reality collaboration system. This system enables assembly personnel to receive pre-assembly training and provides assistance during line integration, enhancing efficiency and accuracy in assembly tasks for online personnel.

本研究相關示意圖
Related schematic diagrams of this study.
-
完成工業控制場域之 Domain Knowledge 建置與攻擊生成等關鍵議題進行技術探討與實務落實
Building Domain Knowledge and Exploring Key Issues in Attack Generation for Industrial Control Environments
-
陳俊良教授的研究團隊致力於解決工業控制場域中日益嚴峻的資訊安全問題。他們針對工業控制場域進行滲透測試,以達成攻擊模擬及分析的目的。並且利用MITRE ATT&CK框架進行可視化分析系統特性,進一步使用機器學習模型針對潛在的工控資安威脅進行安全防禦。
-
Professor Jiann-Liang Chen's research team is dedicated to addressing the increasingly severe information security issues in industrial control fields. They conduct penetration testing in industrial control environments to simulate and analyze attacks. Additionally, they utilize the MITRE ATT&CK framework for visualizing system characteristics and employ machine learning models for defending against potential industrial control cybersecurity threats.
-
交通號誌辨識TSR技術
Traffic Signal Recognition (TSR) Technology
-
陳永耀教授的研究團隊針對台灣的交通號誌進行搜集以及標註,並對交通號誌標註的結果進行號誌辨識,降低自動駕駛意外事故,達到智慧交通,進一步提升安全性,改善我們未來的生活面貌,並創造新的營運模式與應用。
-
Professor Yung-Yao Chen's research team collects and annotates traffic signals in Taiwan. They utilize this data to develop Traffic Signal Recognition (TSR) technology, aiming to reduce accidents in autonomous driving scenarios and enhance road safety for smarter transportation. This effort not only improves future lifestyles but also fosters the creation of new operational models and applications.


本研究成果示意圖
Figure of the research achievement
-
AOI 檢測系統先進視覺檢測演算法
Advanced Visual Inspection Algorithms for AOI Detection System
-
陳永耀教授的研究團隊結合先進視覺檢測數學演算及自主底層先進運動控制系統,進而提供最佳解決方案,讓傳統製造業的邑富有限公司進行改革,大幅提高生產力、創造產業成長動能。
-
Professor Yung-Yao Chen's research team combines advanced visual inspection algorithms with autonomous underlying motion control systems to provide optimal solutions. This enables traditional manufacturing companies like Samurai Spirit Inc. to undergo reform, significantly improving productivity and generating momentum for industry growth.


本研究成果示意圖
Figure of the research achievement
智慧製造創新研發中心建構與升級
Construction and Upgrading of the Smart Manufacturing Innovation R&D Center
-
校本部智慧製造創新研發中心場域建構 CNC 五軸銑床設備智慧化功能升級
Upgrade of Smart Functionality for CNC Five-Axis Milling Machine Equipment at the Main Campus Smart Manufacturing Innovation R&D Center
-
具備進口商用控制器、空間補償系統、商用控制器模擬器、自動量測及補償旋轉中心於控制器、雲端機台精度數位紀錄平台。
-
Equipped with imported commercial controllers, spatial compensation systems, commercial controller simulators, automatic measurement and compensation for rotational centers within the controller, and a cloud-based platform for digital recording of machine accuracy.



-
校本部智慧製造創新研發中心場域建構 CNC 三軸銑床設備智慧化功能升級
Upgrade of Smart Functionality for CNC Three-Axis Milling Machine Equipment at the Main Campus Smart Manufacturing Innovation R&D Center
-
具備進口商用控制器、能源管理系統、ACM自適應功能、線上刀具輪廓掃描測量功能、商用控制器模擬器。
-
Equipped with imported commercial controllers, energy management systems, Adaptive Control Machining (ACM) functionality, online tool profile scanning measurement functionality, and commercial controller simulators.



-
華夏校區智慧製造場域升級
Upgrade of Smart Manufacturing Facilities at Hwa Hsia Campus
-
針對機械系銑床檢定考場以及車床檢定考場建構。
-
Focused on establishing inspection examination venues for milling machines and lathes within the Mechanical Engineering Department.
-
CNC車床、銑床、Robot、PLC遠端監控系統,可提供場域設備資訊串聯(OPC UA 標準通訊協定) 符合國際標準通訊協定OPC UA進行設備資料擷取,透過標準資訊模型可快速串接其他技術系統。
-
Includes CNC lathes, milling machines, robots, and PLC remote monitoring systems capable of providing equipment information interconnection (using the OPC UA standard communication protocol) complying with international standards for communication protocol OPC UA to extract equipment data. Through standard information models, rapid integration with other technical systems is possible.
-
-
場域設備能耗統計資訊系統,取得更詳細及準確的能耗資訊,可進行單一設備的能耗資訊統計,協助管理單位能更精確地制定能源管理計畫。
-
The energy consumption statistical information system for facility equipment enables the acquisition of more detailed and accurate energy consumption data. It allows for the statistical analysis of energy consumption for individual equipment, aiding management units in more accurately formulating energy management plans.
-





國際合作交流
International Collaboration and Exchange
-
顏家鈺校長及交流團拜訪德國德勒斯登工業大學奈米電子研究室(NamLab)
Principal Jia-Yush Yen and Exchange Group Visit NamLab at the Dresden University of Technology in Germany

校長顏家鈺(左五)及交流團拜訪德國德勒斯登工業大學奈米電子研究室(NamLab)
並與中心主任Dr. Thomas Mikolajick (左六)合影
Principal Jia-Yush Yen (fifth from the left) and the exchange group visit NamLab at the Dresden University of Technology in Germany, posing for a photo with Dr. Thomas Mikolajick, the center director (sixth from the left)
-
智慧製造創新中心與美國加州知名大學之國際合作
International Collaboration between IMIC and Renowned University in California, USA
-
智慧製造創新中心主要的標竿中心來自University of Southern California,過去與Center for Cyber-Physical Systems and the Internet of Things及Center for Advanced Manufacturing合作,於2023年則專注於Center for Advanced Manufacturing的技術合作。
-
IMIC primarily collaborates with the University of Southern California. Previously, partnerships were established with the Center for Cyber-Physical Systems and the Internet of Things, as well as the Center for Advanced Manufacturing. In 2023, the focus shifted to technological cooperation with the Center for Advanced Manufacturing.
-
林柏廷教授與周碩彥教授親自拜訪了Center for Advanced Manufacturing,該中心主任為Prof. Satyandra K. Gupta,其專長為工業機器人及其應用,他特別專注於以人為中心的自動化解決方案,試圖以機器人和自動化技術減少人力勞動,使人類能專注於高價值任務,其研究專長與本中心林其禹及林柏廷兩位教授的研究相匹配;另一位中心成員為 Prof. Yong Chen,其研究專長在積層製造,與臺科大積極發展智慧精微製造的方向相匹配。
-
Professors Po Ting Lin and Shuo-Yan Chou personally visited the Center for Advanced Manufacturing, headed by Prof. Satyandra K. Gupta, an expert in industrial robotics and its applications. He particularly focuses on human-centered automation solutions, aiming to reduce manual labor through robotics and automation technologies, allowing humans to concentrate on high-value tasks. His research expertise aligns with the research of Professors Chyi-Yeu Lin and Po Ting Lin at our center. Another member of the center is Prof. Yong Chen, whose research specialization lies in additive manufacturing, aligning with the direction of smart micro-manufacturing actively pursued by NTUST.

林柏廷教授與周碩彥教授親自拜訪USC Center for Advanced Manufacturing所拍攝該中心建築外觀
Professors Po Ting Lin and Shuo-Yan Chou personally visited the USC Center for Advanced Manufacturing and captured the center's architectural exterior.
-
為了更拓展本中心與更多知名大學的國際合作,林柏廷教授與周碩彥教授也同時拜訪了其他加州大學分校。
-
In order to further expand international cooperation with more renowned universities, Professors Po Ting Lin and Shuo-Yan Chou also visited other campuses of the University of California during the same period.
-
兩位教授前往 University of California, Merced 進行深度交流,並與Prof. YangQuan Chen、Prof. Annette Roberts Webb以及Prof. Garett Gietzen合影。Chen教授對於Cyber-Physical System, Unmanned Aerial Vehicle等國際合作有高度的興趣,該些研究與臺科大林其禹、林柏廷、李敏凡等教授的研究領域相匹配,目前正在規劃以雙方交換的模式強化技術交流;Gietzen及 Webb教授則對於雙學位、學生短訪有興趣,期望效法臺科大與University of California, Riverside現有的 3+1+X 模式發展(3:於臺科大從大一攻讀至大三;1:於加州進行專題研究及強化英文;X:於加州延伸至碩士學位)。
-
The two professors visited the University of California, Merced for an in-depth exchange (as shown in the figure below). On the right, Prof. YangQuan Chen, Prof. Annette Roberts Webb, and Prof. Garett Gietzen can be seen. Professor Chen has a keen interest in international collaboration on Cyber-Physical Systems and Unmanned Aerial Vehicles, research areas that align with the expertise of professors such as Chyi-Yeu Lin, Po Ting Lin, and Min-Fan Lee at NTUST. Currently, plans are underway to enhance technical exchanges through reciprocal visits. Professors Gietzen and Webb are interested in dual-degree programs and student short visits, aiming to emulate the existing 3+1+X model between NTUST and the University of California, Riverside (3: study at NTUST from freshman to junior year; 1: conduct research and enhance English proficiency in California; X: extend to pursue a master's degree in California).
-

林柏廷教授與周碩彥教授拜訪University of California, Merced ,並與Prof. YangQuan Chen (右一)、Prof. Annette Roberts Webb (右二)以及Prof. Garett Gietzen (右三)合影
Professors Po Ting Lin and Shuo-Yan Chou visited the University of California, Merced, and took a photo with Prof. YangQuan Chen (on the right), Prof. Annette Roberts Webb (second from the right), and Prof. Garett Gietzen (third from the right).
- 兩位教授親自拜訪了University of California, Los Angeles的Prof. Xiaochun Li,Li教授負責UCLA的Smart Manufacturing Center,帶領著美國多間企業一同朝智慧製造發展,其產學經營模式及規模值得本中心學習。
-
The two professors personally visited Prof. Xiaochun Li at the University of California, Los Angeles. Professor Li is in charge of UCLA's Smart Manufacturing Center, leading multiple American enterprises towards the development of smart manufacturing. The business model and scale of his industrial-academic collaboration are worth learning from for our center.

林柏廷教授與周碩彥教授拜訪University of California, Los Angeles的Prof. Xiaochun Li (右一)
Professors Po Ting Lin and Shuo-Yan Chou visited Prof. Xiaochun Li (on the right) at the University of California, Los Angeles.
- DMG Mori為本中心的標竿企業,林柏廷教授與周碩彥教授拜訪位於加州 Davis 的製造中心,向知名精密製造公司學習先進製造的技術發展現況,本中心預計在2024年拜訪DMG Mori位在芝加哥的show room,更深入理解各式智慧製造應用模式。
-
Professors Po Ting Lin and Shuo-Yan Chou visited the manufacturing center located in Davis, California, as part of their visit to DMG Mori, the benchmark enterprise of our center. They learned about the current developments in advanced manufacturing technology from this renowned precision manufacturing company. The center plans to visit DMG Mori's showroom in Chicago in 2024 to gain a deeper understanding of various smart manufacturing application models.

林柏廷教授拍攝於DMG Mori
Professor Po Ting Lin photographed at DMG Mori.
-
在2023年,本中心的國際平台團隊也拜訪了德州幾個知名學術單位。
-
In 2023, the international platform team of our center also visited several renowned academic institutions in Texas.
-
University of Texas, San Antonio的Prof. Frank Chen,Chen教授負責UTSA的Center for Advanced Manufacturing and Lean Systems,該中心除了專注於先進製造的發展,也注重精實生產,該些研究發展的經驗對於本中心的國際發展有很大的幫 助,尤其在全球注重 SDG 永續發展目標及降低碳排的現況,Chen教授定能協助本中心師生提出創新的智慧製造研究方法。
-
Prof. Frank Chen from the University of Texas, San Antonio, oversees the Center for Advanced Manufacturing and Lean Systems at UTSA. In addition to focusing on the advancement of manufacturing technologies, the center also emphasizes lean production practices. The experiences and research developments from this center are highly beneficial for the international development of our center, particularly in the current global emphasis on SDG sustainable development goals and carbon emission reduction. Professor Chen is expected to assist our center's faculty and students in proposing innovative research methods in smart manufacturing.
-
University of Texas Health的Prof. Chun-Liang Chen,Chen教授近年來在從事生醫晶片的研究,他希望能發展利用血液檢測變能預測病人身體狀況的先進方法,其研究與本校多位從事智慧精微製造方面的教師有關連性。
-
Prof. Chun-Liang Chen from the University of Texas Health is primarily engaged in biomedical chip research in recent years. He aims to develop advanced methods for predicting patients' physical conditions through blood tests. His research is closely related to several faculty members at our university who are engaged in smart micro-manufacturing.
-
Texas A&M University的Prof. Haoyu Niu,Niu教授期望能夠與臺科大一同合作UAV研發及應用,並搭配人工智慧視覺技術,以增進其視覺辨識技術的成效。
-
Prof. Haoyu Niu from Texas A&M University aims to collaborate with Taiwan Tech on UAV (Unmanned Aerial Vehicle) research and applications. He intends to integrate artificial intelligence vision technology to enhance the effectiveness of visual recognition techniques.
-
林柏廷教授與周碩彥教授也拜訪了Texas A&M University的Prof. Bruce Tai,Tai教授專注於加減法製造的研究,在親自拜訪Tai教授的過程中討論到各種多元的跨國合作模式後,Tai教授也在近期回訪臺科大,一同探討如何串聯臺科大的設備及技術,一同朝智慧製造創新領域發展。
-
Professors Po Ting Lin and Shuo-Yan Chou also visited Prof. Bruce Tai at Texas A&M University. Professor Tai focuses on research in additive and subtractive manufacturing. During their visit, various diverse international collaboration models were discussed. Following this visit, Professor Tai recently visited NTUST to explore how to integrate NTUST's equipment and technology, advancing together in the field of smart manufacturing innovation.
-

Prof. Bruce Tai (左一) 拜訪本校工業4.0中心
Prof. Bruce Tai (on the left) visited our Industry 4.0 Center.
-
林柏廷教授與周碩彥教授接受休士頓台灣商會的邀請,於休士頓參加『全球僑臺商產學合作方案交流會』,並發表如何「利用機器人與物聯網改造企業生產與服務」,下圖為經驗分享的過程 。
-
Professors Po Ting Lin and Shuo-Yan Chou accepted the invitation from the Taiwanese Chamber of Commerce of Greater Houston and attended the "Global Taiwanese Entrepreneur and Academic Cooperation Program Exchange Meeting" in Houston. They presented on "Utilizing Robotics and IoT to Transform Enterprise Production and Services." The image below shows the sharing of their experiences.

周碩彥教授 (左一) 於交流會中經驗分享
Professor Shuo-Yan Chou (on the left) sharing his experiences during the exchange meeting.
-
本中心也跟多個東南亞國家進行國際交流,提供東南亞高中生短期訪問,利用高中生來臺科大的機會,讓學生體驗智慧製造實作技術(例如:無線遙控路面載具、氣動柔性機器人、機器人應用等);提供大學生交換的機會,藉此機會讓本中心的智慧製造創新技術外溢至東南亞國家的知名大學,期望招募東南亞國家的優秀學生至臺科大攻讀智慧製造創新相關領域的學位,並專注於智慧製造技術的發展。
-
The center also engages in international exchanges with several Southeast Asian countries, offering short-term visits for high school students. Through these opportunities, students can experience practical smart manufacturing technologies at NTUST, such as wireless remote-controlled ground vehicles, pneumatic soft robots, and robot applications. Additionally, the center provides opportunities for university student exchanges, aiming to disseminate innovative smart manufacturing technologies to renowned universities in Southeast Asian countries. The goal is to recruit outstanding students from Southeast Asian countries to pursue degrees in innovative smart manufacturing-related fields at NTUST, with a focus on advancing smart manufacturing technology.
-
印尼大學:Universitas Indonesia (UI)、Institut Teknologi Bandung (ITB)、Institut Teknologi Sepuluh Nopember (ITS)、Universitas Airlangga (UNAIR)等。
-
Indonesian universities: Universitas Indonesia (UI), Institut Teknologi Bandung (ITB), Institut Teknologi Sepuluh Nopember (ITS), and Universitas Airlangga (UNAIR), and others.
-
越南大學:VinUniversity、Hochiminh City University of Technology (HCMUT)、Hanoi University of Science and Technology (HUST)、Danang University of Science and Technology (DUT)、Can Tho University 等。
-
Vietnamese universities: VinUniversity, Hochiminh City University of Technology (HCMUT), Hanoi University of Science and Technology (HUST), Danang University of Science and Technology (DUT), Can Tho University, and others.
-
越南高中:High School for the Gifted - Hochiminh City、Vietnam National University、Le Hong Phong High School、Tran Dai Nghia High School。
-
Vietnamese high schools: High School for the Gifted - Hochiminh City, Vietnam National University, Le Hong Phong High School, Tran Dai Nghia High School, and others.
-
泰國:Mahidol University。
-
Thailand: Mahidol University.
-
泰國高中:Thai-Chinese International High School。
-
Thailand High School: Thai-Chinese International High School.
-
-
本中心與歐洲多個國家的教授深度合作,包含:義大利UNIVPM的Prof. Matteo Claudio Palpacelli和Prof. Adriano Mancini (目前共同合作自主移動載具及人機協作方面的研究,雙方互派一位研究生至對方研究室進行深度合作,目前也嘗試在發展生成式 AI 等熱門議題)、芬蘭University Oulu的Prof. Tapio Heikkila (專長為大型工業機器人及自動化應用)及Prof. Matti Pietikainen (專長為機器視覺及人工智慧)等。
-
The center collaborates extensively with professors from several European countries, including Professors Matteo Claudio Palpacelli and Adriano Mancini from UNIVPM in Italy. Currently, they are jointly researching autonomous mobile vehicles and human-machine cooperation. Both sides exchange graduate students for in-depth collaboration, and they are also exploring hot topics such as generative AI. Additionally, the center collaborates with Professor Tapio Heikkila, who specializes in large-scale industrial robotics and automation applications, and Professor Matti Pietikainen, who specializes in machine vision and artificial intelligence, from the University of Oulu in Finland.
- 本中心也與澳洲Wollongong University的Prof. Chin-Hsing Kuo,雙方共同設計了一台配備雙自由度機構和全向輪的自主移動機器人(AMR),並用於軟式印刷電路的卷對卷檢測線上,滿足合作廠商的客制化需求。
-
The center also collaborates with Prof. Chin-Hsing Kuo from the University of Wollongong in Australia. Together, they have designed an Autonomous Mobile Robot (AMR) equipped with a dual-degree-of-freedom mechanism and omnidirectional wheels. This robot is utilized in an online roll-to-roll inspection system for flexible printed circuit boards, meeting the customized requirements of collaborating manufacturers.
-
本中心也與韓國KAIST的Prof. Ikjin Lee合作,一同發展智慧機器人的定位誤差及隨機分布,研發可靠性最佳化控制方法。
-
The center also collaborates with Prof. Ikjin Lee from KAIST in South Korea to jointly develop methods for optimizing the reliability of smart robots by addressing positioning errors and random distributions.

林柏廷教授與Prof. Ikjin Lee (左)合影
Prof. Po Ting Lin with Prof. Ikjin Lee (on the left)
-
本中心也與拉脫維亞Institute of Electronics and Computer Science (EDI)的Prof. Modris Greitans、立陶宛Vilnius Gediminas Technical University (Vilnius Tech)的Prof. Vytautas Bučinskas合作,三方一同發展機器視覺技術,整合至細胞操作的精微機器人,可用於生物醫學領域的應用。
-
The center also collaborates with Prof. Modris Greitans from the Institute of Electronics and Computer Science (EDI) in Latvia and Prof. Vytautas Bučinskas from Vilnius Gediminas Technical University (Vilnius Tech) in Lithuania to jointly develop machine vision technology integrated into micro-robots for cell manipulation, applicable in the biomedical field.

林柏廷教授與Prof. Modris Greitans (右三)及Prof. Vytautas Bučinskas (右一)合影
Prof. Po Ting Lin with Prof. Modris Greitans (third from the right) and Prof. Vytautas Bučinskas (on the right).